
近期,齊龍研究員團(tuán)隊(duì)在Food Control(中科院一區(qū)Top,IF=5.6)European Journal of Agronomy(中科院一區(qū)Top,IF=4.5)Computers and Electronics in Agriculture(中科院一區(qū)Top,IF=7.7)等國(guó)際權(quán)威期刊發(fā)表了水稻智能檢測(cè)的研究成果。團(tuán)隊(duì)構(gòu)建的“種子-雜草-苗情”智能檢測(cè)技術(shù)體系,在種子品種識(shí)別、雜草辨識(shí)、苗帶檢測(cè)、缺苗定位等關(guān)鍵技術(shù)上取得了新突破。
基于對(duì)偶注意力的水稻種子品種精準(zhǔn)識(shí)別模型
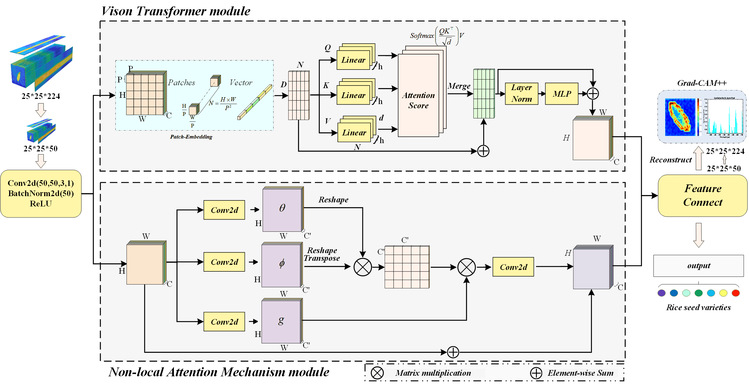
團(tuán)隊(duì)在Food Control發(fā)表題為“Synergistic spectral-spatial fusion in hyperspectral Imaging: Dual attention-based rice seed varieties identification”的研究論文(第一作者:工程學(xué)院博士生唐書(shū)奇;通訊作者:齊龍研究員、馮驍副教授)。

水稻種子品種的精準(zhǔn)識(shí)別是保障良種推廣與生產(chǎn)質(zhì)量的關(guān)鍵環(huán)節(jié)。針對(duì)高光譜成像中復(fù)雜光譜特征捕獲與空間細(xì)節(jié)建模難以協(xié)同優(yōu)化的問(wèn)題,本研究提出了基于雙分支網(wǎng)絡(luò)架構(gòu)的水稻品種識(shí)別模型。該模型融合非局部注意力機(jī)制與Vision-Transformer(ViT),其中,非局部注意力分支精確建模光譜通道間的長(zhǎng)程依賴(lài)關(guān)系,ViT分支有效提取空間結(jié)構(gòu)特征,從而實(shí)現(xiàn)光譜與空間信息的深度協(xié)同融合。實(shí)驗(yàn)結(jié)果表明,該模型在僅8.62MB的輕量級(jí)參數(shù)規(guī)模下,對(duì)長(zhǎng)粳735、長(zhǎng)粳529、吉農(nóng)大1041、吉農(nóng)大959、長(zhǎng)樂(lè)520、禾廣絲苗、19香及粵桂占2號(hào)等8個(gè)水稻品種的識(shí)別準(zhǔn)確率為94.87%,為水稻種子品種的高效、精準(zhǔn)、輕量化識(shí)別提供可靠技術(shù)支撐。
CNN+Transformer的稻田雜草精準(zhǔn)辨識(shí)模型
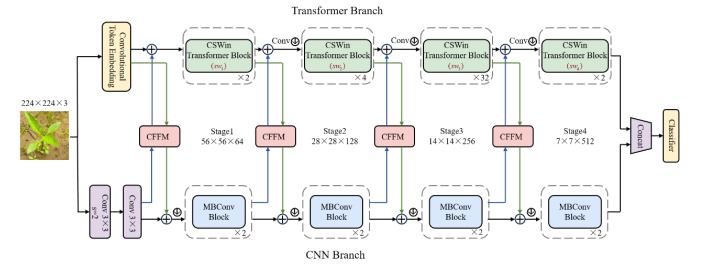
團(tuán)隊(duì)在European Journal of Agronomy發(fā)表題為“CSWin-MBConv: A dual-network fusing CNN and Transformer for weed recognition”的研究論文(第一作者:崔金榮副教授;通訊作者:齊龍研究員、馬銳軍副教授)。
稻田雜草種類(lèi)的精準(zhǔn)辨識(shí)是實(shí)施精準(zhǔn)除草作業(yè)的前提。針對(duì)自然光照擾動(dòng)、稻田復(fù)雜背景及同科(屬)雜草間形態(tài)相似等因素導(dǎo)致的識(shí)別精度低問(wèn)題,本研究提出了融合CNN與Transformer的雙分支特征提取網(wǎng)絡(luò)。該網(wǎng)絡(luò)基于CNN局部細(xì)粒度特征捕獲與Transformer全局語(yǔ)義關(guān)聯(lián)建模的協(xié)同機(jī)制,有效提升了雜草特征的表達(dá)能力,突破了同科(屬)雜草形態(tài)相似性識(shí)別瓶頸。田間試驗(yàn)表明:該模型可實(shí)現(xiàn)對(duì)稻田6種主要雜草(稗草、千金子、空心蓮子草、丁香蓼、野慈姑、鱧腸)的精準(zhǔn)識(shí)別,識(shí)別準(zhǔn)確率大于98%,性能優(yōu)于單一CNN、單一Transformer及其他主流對(duì)比模型。
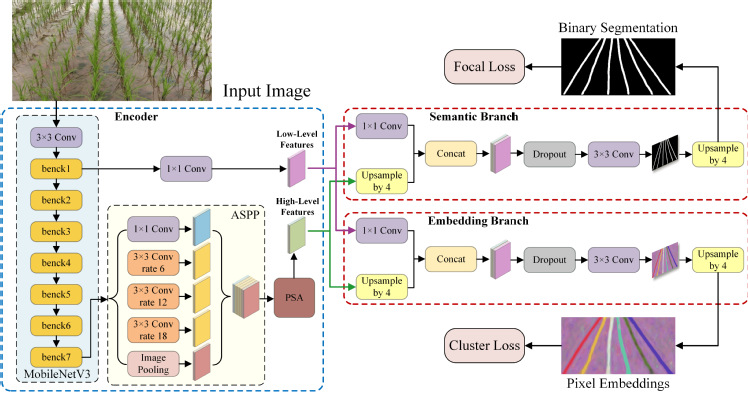
基于實(shí)例分割的水稻苗帶精準(zhǔn)檢測(cè)模型
團(tuán)隊(duì)在Computers and Electronics in Agriculture發(fā)表題為“Towards end-to-end rice row detection in paddy fields exploiting two-pathway instance segmentation”的研究論文(第一作者:工程學(xué)院碩士研究生陳芷瑩;通訊作者:齊龍研究員、馬銳軍副教授)。
水稻苗帶的精準(zhǔn)檢測(cè)是農(nóng)機(jī)自主導(dǎo)航和田間精準(zhǔn)作業(yè)的前提。針對(duì)稻田光照多變、秧苗形態(tài)多樣及冠層遮蔽導(dǎo)致的苗帶檢測(cè)魯棒性不足問(wèn)題,本研究提出了基于實(shí)例分割的端到端水稻苗帶檢測(cè)方法,構(gòu)建了融合語(yǔ)義分割和像素嵌入的雙分支模型。通過(guò)融合MobileNetV3-Small輕量化架構(gòu)和極化自注意力機(jī)制,模型在保持13.0 MB小體積下實(shí)現(xiàn)39.37 FPS推理速度,mIoU為69.24%,顯著提升分蘗期苗帶檢測(cè)的魯棒性與實(shí)時(shí)性,滿(mǎn)足農(nóng)機(jī)自主導(dǎo)航對(duì)高精度、高幀率與低延遲的作業(yè)要求。
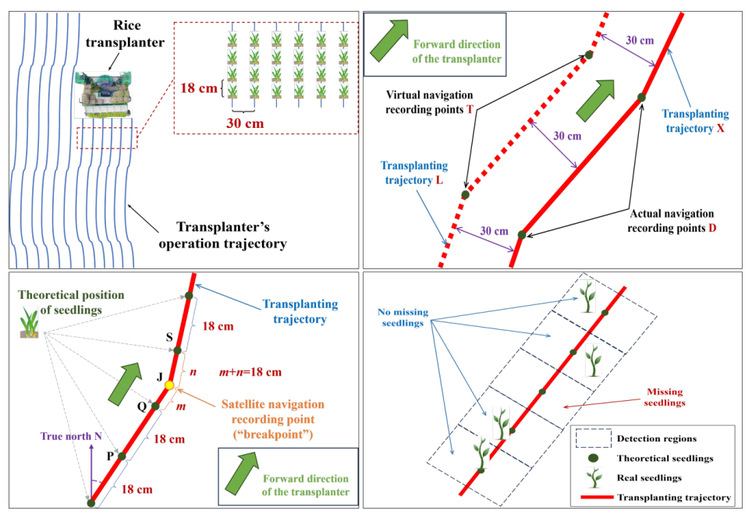
無(wú)人機(jī)-農(nóng)機(jī)協(xié)同的稻田缺苗智能定位模型
團(tuán)隊(duì)在Computers and Electronics in Agriculture發(fā)表題為“A novel method for detecting missing seedlings based on UAV images and rice transplanter operation information”的研究論文(第一作者:吳雙龍副教授;通訊作者:齊龍研究員、林彩霞老師)。
在水稻生產(chǎn)過(guò)程中,缺苗是影響產(chǎn)量和資源利用效率的關(guān)鍵問(wèn)題。傳統(tǒng)光電傳感器易受田間環(huán)境干擾,而基于單一機(jī)器視覺(jué)的方法因缺乏作業(yè)位置信息,存在模型泛化性差、定位精度不足等問(wèn)題。為此,本研究提出了融合無(wú)人機(jī)影像與插秧機(jī)作業(yè)信息的稻田缺苗定位模型。該模型通過(guò)無(wú)人機(jī)航拍構(gòu)建稻田影像數(shù)據(jù)集,結(jié)合插秧機(jī)導(dǎo)航軌跡及作業(yè)參數(shù)(如株距、行距),精準(zhǔn)推算每株秧苗的預(yù)期種植位置;進(jìn)一步融合高精度秧苗識(shí)別模型與坐標(biāo)轉(zhuǎn)換算法,實(shí)現(xiàn)缺苗點(diǎn)地理坐標(biāo)的精準(zhǔn)定位。實(shí)驗(yàn)結(jié)果表明,該方法無(wú)需依賴(lài)復(fù)雜算法即可顯著提升檢測(cè)精度,并同步獲取缺苗點(diǎn)的位置信息,為水稻精準(zhǔn)補(bǔ)種提供決策依據(jù)。
上述研究得到了國(guó)家自然科學(xué)基金(U23A20174)、國(guó)家水稻產(chǎn)業(yè)體系崗位專(zhuān)家(CARS-01)、廣東特支計(jì)劃-省農(nóng)業(yè)農(nóng)村廳(農(nóng)業(yè)與農(nóng)村振興人才)(NYLJ2024004)和特定高校學(xué)科建設(shè)專(zhuān)項(xiàng)(2023B10564002)等項(xiàng)目資助。
相關(guān)論文鏈接:
https://www.sciencedirect.com/science/article/pii/S0956713525002804
https://www.sciencedirect.com/science/article/pii/S1161030125000243
https://www.sciencedirect.com/science/article/pii/S0168169925000699
https://www.sciencedirect.com/science/article/pii/S0168169924011803
文圖/水利與土木工程學(xué)院
