
近日,,我校工程學(xué)院馬瑞峻/陳瑜團(tuán)隊在國際知名期刊Computers and Electronics in Agriculture(中科院一區(qū)Top,,影響因子8.3)上發(fā)表題為“Three-dimensional localization and mapping of multiagricultural scenes via hierarchically-coupled LiDAR-inertial odometry”的研究論文,。論文提出一種基于無特征設(shè)計的分層耦合策略處理激光點云數(shù)據(jù)和慣性測量數(shù)據(jù)的激光慣性SLAM(Simultaneous Localization and Mapping,,同時定位與建圖)系統(tǒng),為農(nóng)業(yè)機器人在不同農(nóng)業(yè)種植場景進(jìn)行空間定位和環(huán)境測繪提供了新的研究思路和方法,。
準(zhǔn)確的態(tài)勢感知對于各種農(nóng)業(yè)任務(wù)至關(guān)重要,,也是自主農(nóng)業(yè)機器人的基礎(chǔ)?;谝曈X和LiDAR的SLAM技術(shù)已經(jīng)廣泛應(yīng)用在各類農(nóng)業(yè)機器人上,,例如農(nóng)業(yè)機器人的狀態(tài)估計和環(huán)境感知,但是,,大多數(shù)方法在前端采用了基于規(guī)則的特征設(shè)計及提取方式進(jìn)行,。由于農(nóng)業(yè)場景中基于人工規(guī)則的幾何特征設(shè)計及提取方式是不穩(wěn)定的,加之傳統(tǒng) LiDAR SLAM前端又對邊緣和平面幾何特征高度依賴,,使得在非結(jié)構(gòu)化且復(fù)雜的農(nóng)業(yè)種植場景為各類農(nóng)業(yè)機器人設(shè)計穩(wěn)定的定位與建圖系統(tǒng)是一項挑戰(zhàn),。
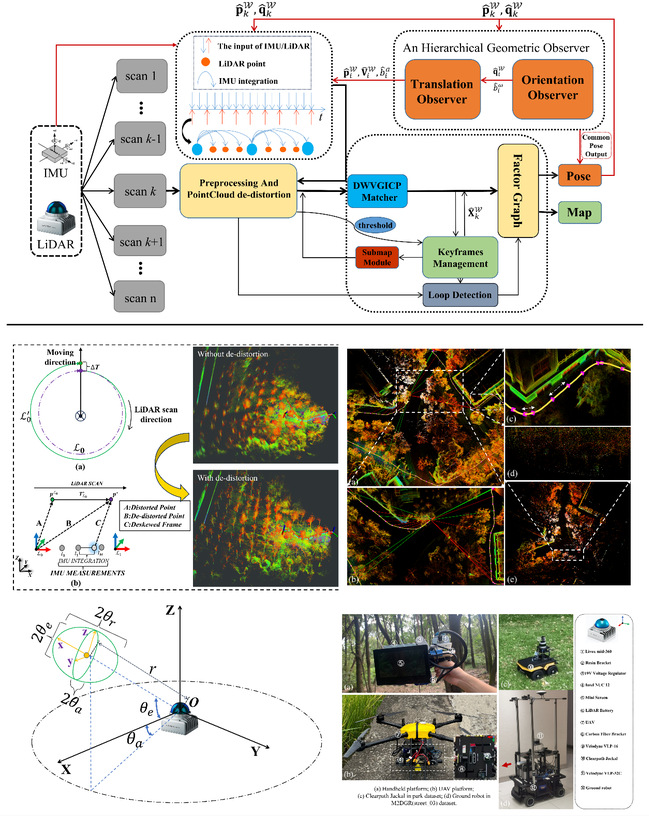
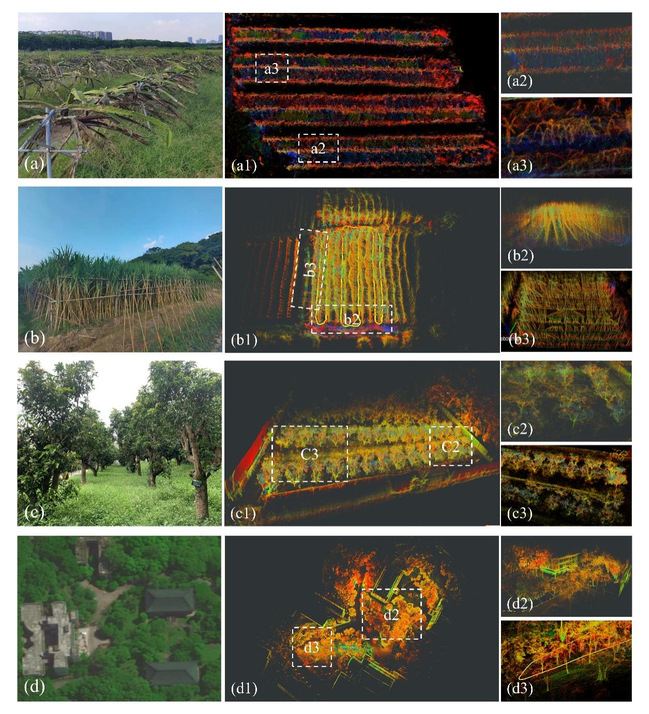
針對上述問題,論文提出了一種無特征設(shè)計的分層耦合LiDAR-慣性里程計并基于增量因子圖結(jié)合回環(huán)檢測的綜合 SLAM 系統(tǒng),。通過基于裁剪和統(tǒng)計過濾器去除來自機器人自身的測距點和異常點,;使用慣性測量單元 (IMU)數(shù)據(jù)建模農(nóng)業(yè)機器人的非線性運動過程來消除由快速移動和轉(zhuǎn)彎引起的點云失真;在系統(tǒng)前端提出一種增強型體素化廣義迭代最近點方法,,該方法采用自適應(yīng)概率分布方式對基于激光掃描到全局子圖策略的點云注冊過程進(jìn)行權(quán)重更新,;在系統(tǒng)后端則利用一個結(jié)合回環(huán)檢測的增量因子圖和幾何觀察器分層耦合LiDAR觀測和IMU觀測,來優(yōu)化并收斂 LiDAR 關(guān)鍵幀和公共幀的全局狀態(tài)估計,,同時更新IMU狀態(tài)的零偏,。實驗結(jié)果表明,本文的方法能在多種開放或密集的農(nóng)作物種植場景中進(jìn)行高效的農(nóng)業(yè)機器人狀態(tài)估計和環(huán)境測繪任務(wù),,并且基于無特征設(shè)計的前端可以直接適配不同掃描模式(例如,,機械式,混合固態(tài)式,,純固態(tài)式)的LiDAR傳感器,。這項探索性研究為未來通用智慧農(nóng)業(yè)機器人平臺中的SLAM應(yīng)用提供了理論和技術(shù)參考,具有廣泛的基礎(chǔ)應(yīng)用能力,,可以為智慧農(nóng)業(yè)提供必要的技術(shù)支持,。
2022級機器人工程專業(yè)碩士研究生洪苑乾為論文第一作者,,馬瑞峻教授和陳瑜副教授為論文的共同通訊作者。該研究得到了國家自然科學(xué)基金項目的資助,。
相關(guān)論文信息:https://www.sciencedirect.com/science/article/pii/S0168169924008780
文圖/工程學(xué)院
