
近期,,齊龍研究員團(tuán)隊(duì)在IEEE Transactions on Image Processing(CCF A類期刊、中科院一區(qū)Top,,影響因子10.8),、Smart Agricultural Technology(JCR 1區(qū),,影響因子6.3)、Computers and Electronics in Agriculture(中科院一區(qū)Top,,影響因子7.7)等刊物上發(fā)表了農(nóng)業(yè)機(jī)器視覺(jué)研究的新成果,,在水田雜草精準(zhǔn)識(shí)別和視覺(jué)導(dǎo)航方面取得了新突破。
頻域+Attention的水田雜草精準(zhǔn)辨識(shí)網(wǎng)絡(luò)
團(tuán)隊(duì)在國(guó)際著名刊物IEEE Transactions on Image Processing上發(fā)表題為“Learning Attention in the Frequency Domain for Flexible Real Photograph Denoising”的研究論文,。該論文聯(lián)合澳門(mén)大學(xué)及湖南大學(xué)共同完成,。工程學(xué)院馬銳軍老師為第一作者,水利與土木工程學(xué)院齊龍研究員和澳門(mén)大學(xué)張一博副教授為共同通訊作者,。
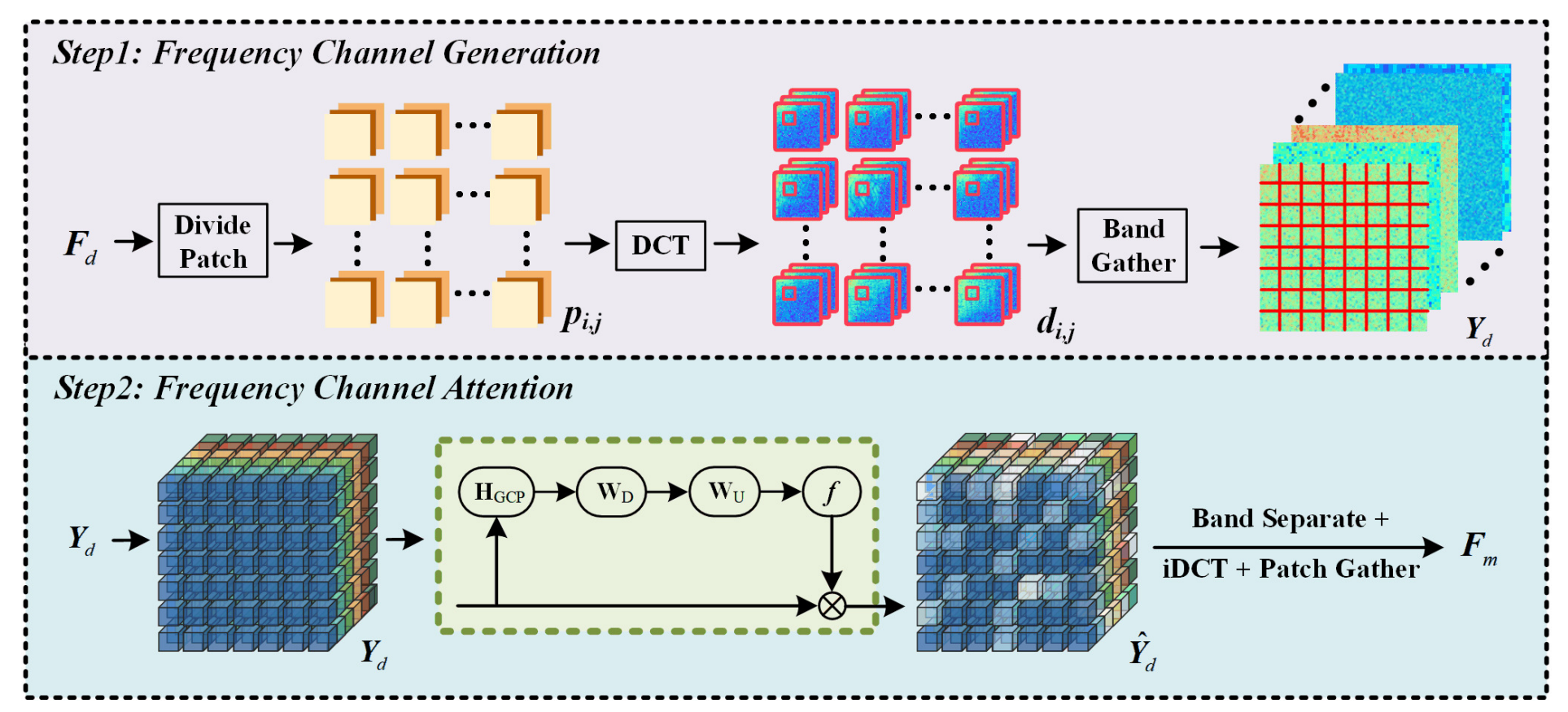
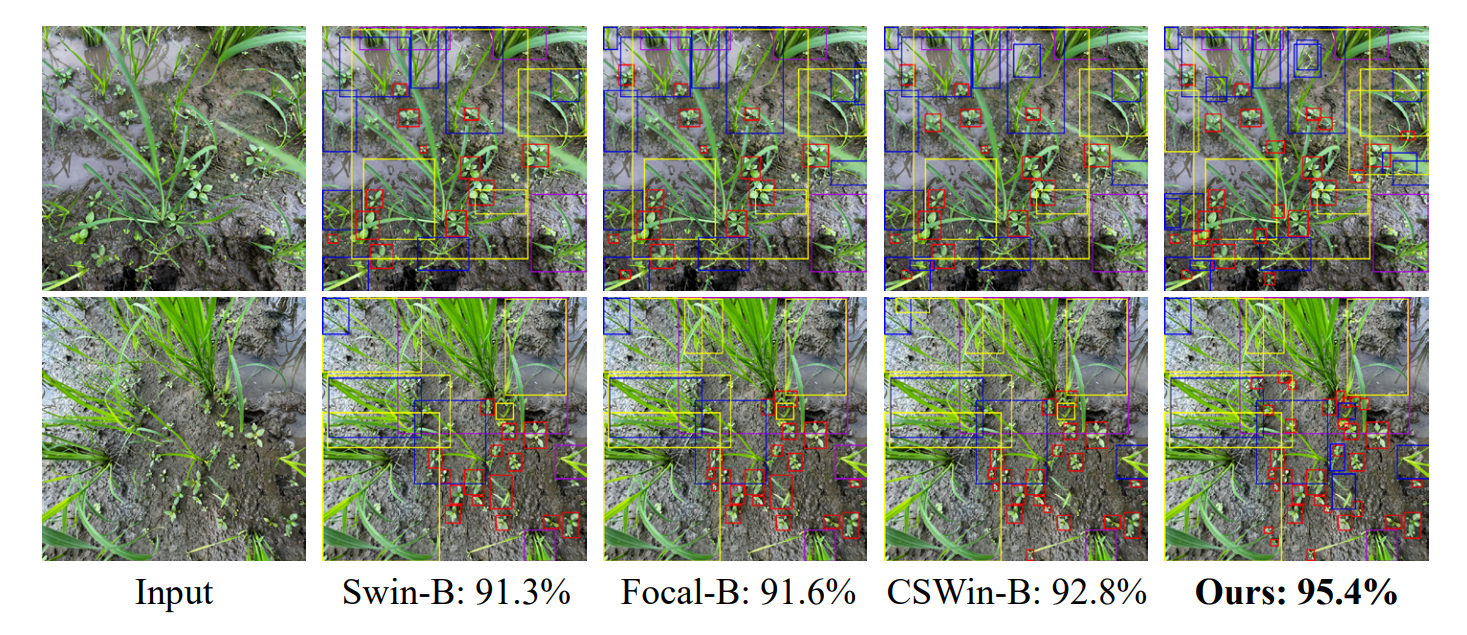
現(xiàn)有基于自注意力,、通道/空間注意力的深度學(xué)習(xí)模型,在非結(jié)構(gòu)化水田環(huán)境下難以提取具有表達(dá)力和判別性的雜草表征信息,。在本研究中,,團(tuán)隊(duì)利用離散余弦變換將空域的雜草深度特征轉(zhuǎn)換到頻域上,并將相同的頻率特征進(jìn)行聚類,;設(shè)計(jì)了基于二階注意力機(jī)制的網(wǎng)絡(luò)架構(gòu),,顯示地建模不同頻域特征的相關(guān)性,提高雜草表征信息的交互性能。在此基礎(chǔ)上,,構(gòu)建了多頭注意力模塊,,以挖掘更多的頻率特征分量,實(shí)現(xiàn)了雜草語(yǔ)義信息以及局部特征的深度挖掘,。實(shí)驗(yàn)結(jié)果表明:所提算法可實(shí)現(xiàn)對(duì)稻田6種主要雜草(稗草,、千金子、空心蓮子草,、丁香蓼,、野慈姑、鱧腸)的精準(zhǔn)識(shí)別,,識(shí)別準(zhǔn)確率大于95%,。
基于點(diǎn)標(biāo)簽的弱監(jiān)督稻田雜草實(shí)例分割網(wǎng)絡(luò)
團(tuán)隊(duì)在國(guó)際著名刊物Smart Agricultural Technology上發(fā)表題為“PIS-Net: Efficient Weakly Supervised Instance Segmentation Network based on Annotated Points for Rice Field Weed Identification”的研究論文。工程學(xué)院碩士研究生陳豪為第一作者,,水利與土木工程學(xué)院齊龍研究員和工程學(xué)院馬銳軍副教授為共同通訊作者,。
近年來(lái),深度學(xué)習(xí)技術(shù)廣泛應(yīng)用于農(nóng)田雜草種類識(shí)別和位置信息獲取,。然而,,現(xiàn)有的模型大多在有限的數(shù)據(jù)規(guī)模下進(jìn)行訓(xùn)練,且只針對(duì)有限的雜草類型,,限制了模型的泛化性能和適用范圍,。本研究中,團(tuán)隊(duì)提出了基于點(diǎn)標(biāo)簽的弱監(jiān)督雜草實(shí)例分割模型,,該模型在每個(gè)雜草實(shí)例內(nèi)隨機(jī)生成13個(gè)點(diǎn)標(biāo)簽后,,設(shè)計(jì)實(shí)例掩模生成策略與自適應(yīng)精煉網(wǎng)絡(luò),并結(jié)合多層級(jí)的特征金字塔結(jié)構(gòu),,通過(guò)迭代訓(xùn)練,,該網(wǎng)絡(luò)能快速提取雜草語(yǔ)義實(shí)例特征,實(shí)現(xiàn)非結(jié)構(gòu)環(huán)境下水田雜草種類的精準(zhǔn)識(shí)別和位置信息的獲取,。
基于視覺(jué)的水田機(jī)器人作業(yè)軌跡生成方法和跟蹤模型
團(tuán)隊(duì)在國(guó)際著名刊物Computers and Electronics in Agriculture上發(fā)表題為“Vision-based Trajectory Generation and Tracking Algorithm for Maneuvering of a Paddy Field Robot”的研究論文,。工程學(xué)院博士研究生傅燈斌為第一作者,水利與土木工程學(xué)院齊龍研究員和工程學(xué)院馮驍副教授為共同通訊作者,。
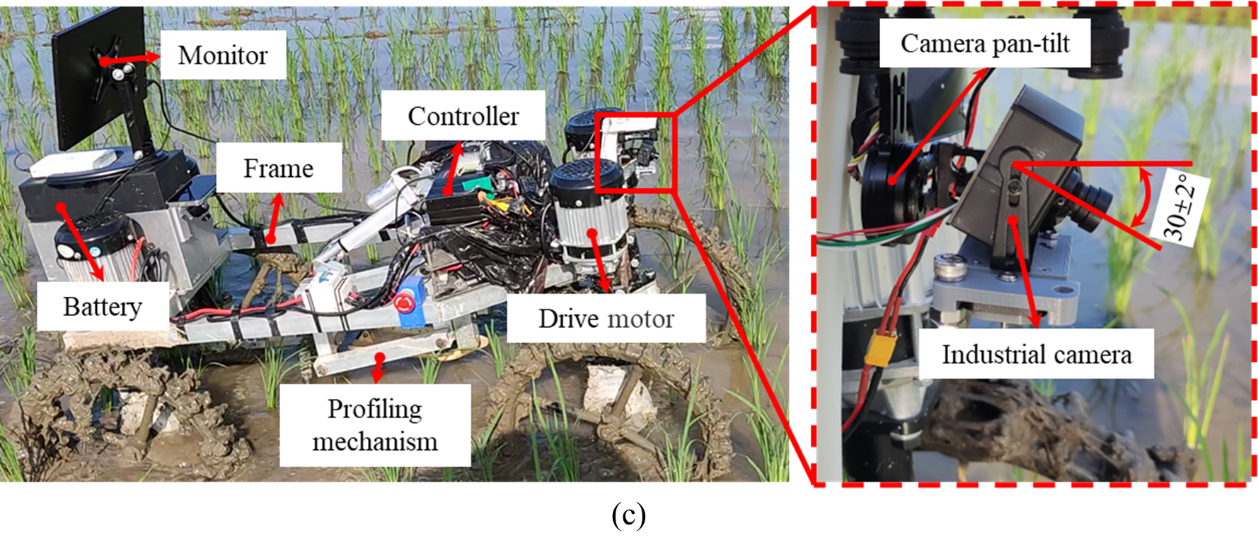
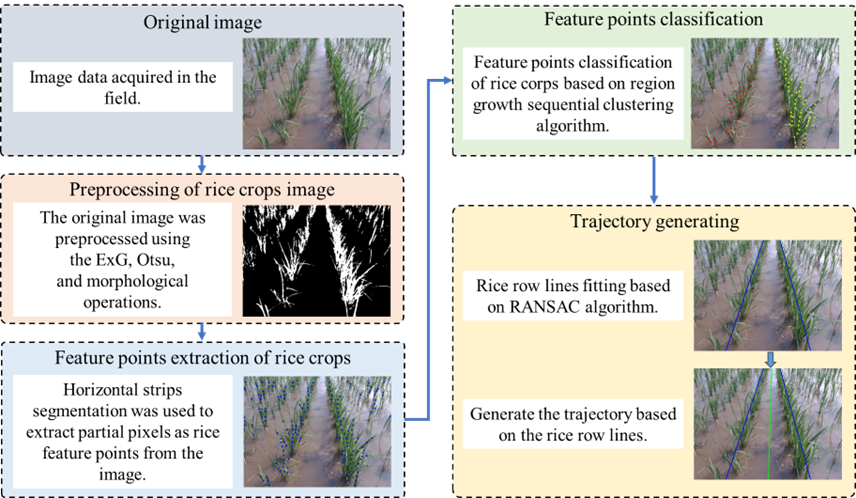
在農(nóng)業(yè)機(jī)器人導(dǎo)航中,,由于視覺(jué)導(dǎo)航能夠捕捉環(huán)境語(yǔ)義信息,相較于其他方法可有效降低作業(yè)傷苗率,。在本研究中,團(tuán)隊(duì)設(shè)計(jì)了一種基于視覺(jué)的作業(yè)軌跡生成方法與跟蹤控制模型,,旨在指導(dǎo)田間管理機(jī)器人隨行作業(yè),。為了精準(zhǔn)獲取作業(yè)軌跡,設(shè)計(jì)了一種基于區(qū)域生長(zhǎng)順序聚類-隨機(jī)樣本一致性(RANSAC)的水稻作物行快速檢測(cè)算法。此外,,為了滿足非結(jié)構(gòu)化水田環(huán)境下機(jī)器人的運(yùn)動(dòng)控制需求,,設(shè)計(jì)了一種基于滑移動(dòng)力學(xué)的預(yù)測(cè)控制器,且可部署到嵌入式設(shè)備上,。田間試驗(yàn)表明:該機(jī)器人分別以0.3m/s,、0.6m/s和0.9m/s的速度運(yùn)行時(shí),橫向誤差分別為4.55cm,、5.65cm和6.41cm,;且運(yùn)行過(guò)程中可有效避免作物損傷,滿足田間管理機(jī)器人自主導(dǎo)航的作業(yè)要求,。
上述研究得到了國(guó)家自然科學(xué)基金(U23A20174,、62302171)、國(guó)家水稻產(chǎn)業(yè)體系崗位專家(CARS-01)和廣東省重點(diǎn)研發(fā)計(jì)劃(2023B0202130001)等項(xiàng)目資助,。
論文鏈接:
https://ieeexplore.ieee.org/document/10541898
https://doi.org/10.1016/j.atech.2024.100557
https://www.sciencedirect.com/science/article/pii/S0168169924007592?dgcid=coauthor
文圖/水利與土木工程學(xué)院
